Docker and the Device Mapper storage driver
Device Mapper is a kernel-based framework that underpins many advanced
volume management technologies on Linux. Docker's devicemapper storage driver
leverages the thin provisioning and snapshotting capabilities of this framework
for image and container management. This article refers to the Device Mapper
storage driver as devicemapper, and the kernel framework as Device Mapper.
Note: The Commercially Supported Docker Engine (CS-Engine) running on RHEL and CentOS Linux requires that you use the
devicemapperstorage driver.
An alternative to AUFS
Docker originally ran on Ubuntu and Debian Linux and used AUFS for its storage backend. As Docker became popular, many of the companies that wanted to use it were using Red Hat Enterprise Linux (RHEL). Unfortunately, because the upstream mainline Linux kernel did not include AUFS, RHEL did not use AUFS either.
To correct this Red Hat developers investigated getting AUFS into the mainline
kernel. Ultimately, though, they decided a better idea was to develop a new
storage backend. Moreover, they would base this new storage backend on existing
Device Mapper technology.
Red Hat collaborated with Docker Inc. to contribute this new driver. As a result
of this collaboration, Docker's Engine was re-engineered to make the storage
backend pluggable. So it was that the devicemapper became the second storage
driver Docker supported.
Device Mapper has been included in the mainline Linux kernel since version
2.6.9. It is a core part of RHEL family of Linux distributions. This means that
the devicemapper storage driver is based on stable code that has a lot of
real-world production deployments and strong community support.
Image layering and sharing
The devicemapper driver stores every image and container on its own virtual
device. These devices are thin-provisioned copy-on-write snapshot devices.
Device Mapper technology works at the block level rather than the file level.
This means that devicemapper storage driver's thin provisioning and
copy-on-write operations work with blocks rather than entire files.
Note: Snapshots are also referred to as thin devices or virtual devices. They all mean the same thing in the context of the
devicemapperstorage driver.
With devicemapper the high level process for creating images is as follows:
-
The
devicemapperstorage driver creates a thin pool.The pool is created from block devices or loop mounted sparse files (more on this later).
-
Next it creates a base device.
A base device is a thin device with a filesystem. You can see which filesystem is in use by running the
docker infocommand and checking theBacking filesystemvalue. -
Each new image (and image layer) is a snapshot of this base device.
These are thin provisioned copy-on-write snapshots. This means that they are initially empty and only consume space from the pool when data is written to them.
With devicemapper, container layers are snapshots of the image they are
created from. Just as with images, container snapshots are thin provisioned
copy-on-write snapshots. The container snapshot stores all updates to the
container. The devicemapper allocates space to them on-demand from the pool
as and when data is written to the container.
The high level diagram below shows a thin pool with a base device and two images.
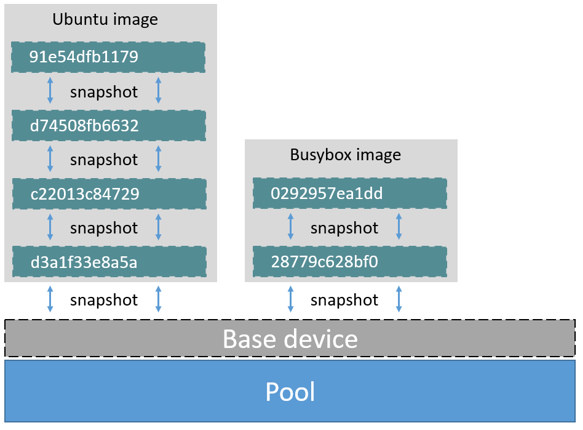
If you look closely at the diagram you'll see that it's snapshots all the way
down. Each image layer is a snapshot of the layer below it. The lowest layer of
each image is a snapshot of the the base device that exists in the pool. This
base device is a Device Mapper artifact and not a Docker image layer.
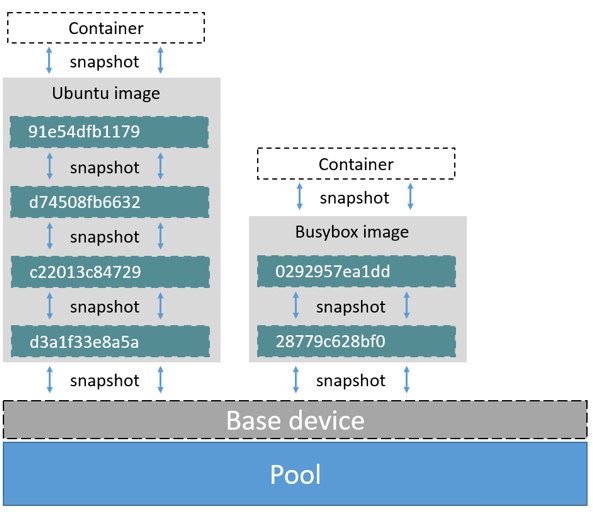
A container is a snapshot of the image it is created from. The diagram below shows two containers - one based on the Ubuntu image and the other based on the Busybox image.
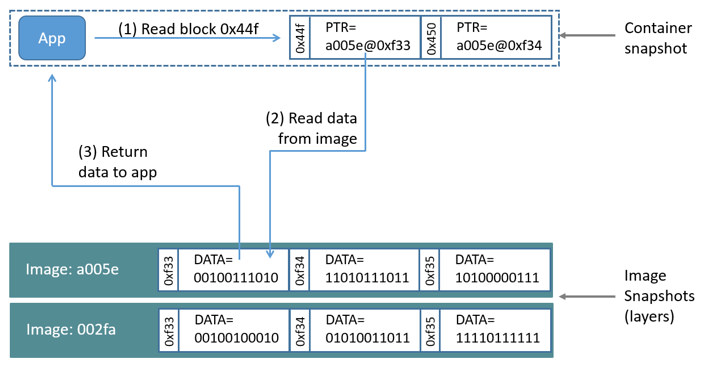
Reads with the devicemapper
Let's look at how reads and writes occur using the devicemapper storage
driver. The diagram below shows the high level process for reading a single
block (0x44f) in an example container.
-
An application makes a read request for block
0x44fin the container.Because the container is a thin snapshot of an image it does not have the data. Instead, it has a pointer (PTR) to where the data is stored in the image snapshot lower down in the image stack.
-
The storage driver follows the pointer to block
0xf33in the snapshot relating to image layera005.... -
The
devicemappercopies the contents of block0xf33from the image snapshot to memory in the container. -
The storage driver returns the data to the requesting application.
Write examples
With the devicemapper driver, writing new data to a container is accomplished
by an allocate-on-demand operation. Updating existing data uses a
copy-on-write operation. Because Device Mapper is a block-based technology
these operations occur at the block level.
For example, when making a small change to a large file in a container, the
devicemapper storage driver does not copy the entire file. It only copies the
blocks to be modified. Each block is 64KB.
Writing new data
To write 56KB of new data to a container:
-
An application makes a request to write 56KB of new data to the container.
-
The allocate-on-demand operation allocates a single new 64KB block to the container's snapshot.
If the write operation is larger than 64KB, multiple new blocks are allocated to the container's snapshot.
-
The data is written to the newly allocated block.
Overwriting existing data
To modify existing data for the first time:
-
An application makes a request to modify some data in the container.
-
A copy-on-write operation locates the blocks that need updating.
-
The operation allocates new empty blocks to the container snapshot and copies the data into those blocks.
-
The modified data is written into the newly allocated blocks.
The application in the container is unaware of any of these allocate-on-demand and copy-on-write operations. However, they may add latency to the application's read and write operations.
Configuring Docker with Device Mapper
The devicemapper is the default Docker storage driver on some Linux
distributions. This includes RHEL and most of its forks. Currently, the
following distributions support the driver:
- RHEL/CentOS/Fedora
- Ubuntu 12.04
- Ubuntu 14.04
- Debian
Docker hosts running the devicemapper storage driver default to a
configuration mode known as loop-lvm. This mode uses sparse files to build
the thin pool used by image and container snapshots. The mode is designed to
work out-of-the-box with no additional configuration. However, production
deployments should not run under loop-lvm mode.
You can detect the mode by viewing the docker info command:
$ sudo docker info
Containers: 0
Images: 0
Storage Driver: devicemapper
Pool Name: docker-202:2-25220302-pool
Pool Blocksize: 65.54 kB
Backing Filesystem: xfs
...
Data loop file: /var/lib/docker/devicemapper/devicemapper/data
Metadata loop file: /var/lib/docker/devicemapper/devicemapper/metadata
Library Version: 1.02.93-RHEL7 (2015-01-28)
...
The output above shows a Docker host running with the devicemapper storage
driver operating in loop-lvm mode. This is indicated by the fact that the
Data loop file and a Metadata loop file are on files under
/var/lib/docker/devicemapper/devicemapper. These are loopback mounted sparse
files.
Configure direct-lvm mode for production
The preferred configuration for production deployments is direct lvm. This
mode uses block devices to create the thin pool. The following procedure shows
you how to configure a Docker host to use the devicemapper storage driver in
a direct-lvm configuration.
Caution: If you have already run the Docker daemon on your Docker host and have images you want to keep,
pushthem Docker Hub or your private Docker Trusted Registry before attempting this procedure.
The procedure below will create a 90GB data volume and 4GB metadata volume to
use as backing for the storage pool. It assumes that you have a spare block
device at /dev/xvdf with enough free space to complete the task. The device
identifier and volume sizes may be be different in your environment and you
should substitute your own values throughout the procedure. The procedure also
assumes that the Docker daemon is in the stopped state.
-
Log in to the Docker host you want to configure and stop the Docker daemon.
-
If it exists, delete your existing image store by removing the
/var/lib/dockerdirectory.$ sudo rm -rf /var/lib/docker -
Create an LVM physical volume (PV) on your spare block device using the
pvcreatecommand.$ sudo pvcreate /dev/xvdf Physical volume `/dev/xvdf` successfully createdThe device identifier may be different on your system. Remember to substitute your value in the command above.
-
Create a new volume group (VG) called
vg-dockerusing the PV created in the previous step.$ sudo vgcreate vg-docker /dev/xvdf Volume group `vg-docker` successfully created -
Create a new 90GB logical volume (LV) called
datafrom space in thevg-dockervolume group.$ sudo lvcreate -L 90G -n data vg-docker Logical volume `data` created.The command creates an LVM logical volume called
dataand an associated block device file at/dev/vg-docker/data. In a later step, you instruct thedevicemapperstorage driver to use this block device to store image and container data.If you receive a signature detection warning, make sure you are working on the correct devices before continuing. Signature warnings indicate that the device you're working on is currently in use by LVM or has been used by LVM in the past.
-
Create a new logical volume (LV) called
metadatafrom space in thevg-dockervolume group.$ sudo lvcreate -L 4G -n metadata vg-docker Logical volume `metadata` created.This creates an LVM logical volume called
metadataand an associated block device file at/dev/vg-docker/metadata. In the next step you instruct thedevicemapperstorage driver to use this block device to store image and container metadata. -
Start the Docker daemon with the
devicemapperstorage driver and the--storage-optflags.The
dataandmetadatadevices that you pass to the--storage-optoptions were created in the previous steps.$ sudo docker daemon --storage-driver=devicemapper --storage-opt dm.datadev=/dev/vg-docker/data --storage-opt dm.metadatadev=/dev/vg-docker/metadata & [1] 2163 [root@ip-10-0-0-75 centos]# INFO[0000] Listening for HTTP on unix (/var/run/docker.sock) INFO[0027] Option DefaultDriver: bridge INFO[0027] Option DefaultNetwork: bridge <output truncated> INFO[0027] Daemon has completed initialization INFO[0027] Docker daemon commit=0a8c2e3 execdriver=native-0.2 graphdriver=devicemapper version=1.8.2It is also possible to set the
--storage-driverand--storage-optflags in the Docker config file and start the daemon normally using theserviceorsystemdcommands. -
Use the
docker infocommand to verify that the daemon is usingdataandmetadatadevices you created.$ sudo docker info INFO[0180] GET /v1.20/info Containers: 0 Images: 0 Storage Driver: devicemapper Pool Name: docker-202:1-1032-pool Pool Blocksize: 65.54 kB Backing Filesystem: xfs Data file: /dev/vg-docker/data Metadata file: /dev/vg-docker/metadata [...]The output of the command above shows the storage driver as
devicemapper. The last two lines also confirm that the correct devices are being used for theData fileand theMetadata file.
Examine devicemapper structures on the host
You can use the lsblk command to see the device files created above and the
pool that the devicemapper storage driver creates on top of them.
$ sudo lsblk
NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT
xvda 202:0 0 8G 0 disk
└─xvda1 202:1 0 8G 0 part /
xvdf 202:80 0 10G 0 disk
├─vg--docker-data 253:0 0 90G 0 lvm
│ └─docker-202:1-1032-pool 253:2 0 10G 0 dm
└─vg--docker-metadata 253:1 0 4G 0 lvm
└─docker-202:1-1032-pool 253:2 0 10G 0 dm
The diagram below shows the image from prior examples updated with the detail
from the lsblk command above.

In the diagram, the pool is named Docker-202:1-1032-pool and spans the data
and metadata devices created earlier. The devicemapper constructs the pool
name as follows:
Docker-MAJ:MIN-INO-pool
MAJ, MIN and INO refer to the major and minor device numbers and inode.
Because Device Mapper operates at the block level it is more difficult to see
diffs between image layers and containers. Docker 1.10 and later no longer
matches image layer IDs with directory names in /var/lib/docker. However,
there are two key directories. The /var/lib/docker/devicemapper/mnt directory
contains the mount points for image and container layers. The
/var/lib/docker/devicemapper/metadatadirectory contains one file for every
image layer and container snapshot. The files contain metadata about each
snapshot in JSON format.
Device Mapper and Docker performance
It is important to understand the impact that allocate-on-demand and copy-on-write operations can have on overall container performance.
Allocate-on-demand performance impact
The devicemapper storage driver allocates new blocks to a container via an
allocate-on-demand operation. This means that each time an app writes to
somewhere new inside a container, one or more empty blocks has to be located
from the pool and mapped into the container.
All blocks are 64KB. A write that uses less than 64KB still results in a single 64KB block being allocated. Writing more than 64KB of data uses multiple 64KB blocks. This can impact container performance, especially in containers that perform lots of small writes. However, once a block is allocated to a container subsequent reads and writes can operate directly on that block.
Copy-on-write performance impact
Each time a container updates existing data for the first time, the
devicemapper storage driver has to perform a copy-on-write operation. This
copies the data from the image snapshot to the container's snapshot. This
process can have a noticeable impact on container performance.
All copy-on-write operations have a 64KB granularity. As a results, updating 32KB of a 1GB file causes the driver to copy a single 64KB block into the container's snapshot. This has obvious performance advantages over file-level copy-on-write operations which would require copying the entire 1GB file into the container layer.
In practice, however, containers that perform lots of small block writes
(<64KB) can perform worse with devicemapper than with AUFS.
Other device mapper performance considerations
There are several other things that impact the performance of the
devicemapper storage driver.
-
The mode. The default mode for Docker running the
devicemapperstorage driver isloop-lvm. This mode uses sparse files and suffers from poor performance. It is not recommended for production. The recommended mode for production environments isdirect-lvmwhere the storage driver writes directly to raw block devices. -
High speed storage. For best performance you should place the
Data fileandMetadata fileon high speed storage such as SSD. This can be direct attached storage or from a SAN or NAS array. -
Memory usage.
devicemapperis not the most memory efficient Docker storage driver. Launching n copies of the same container loads n copies of its files into memory. This can have a memory impact on your Docker host. As a result, thedevicemapperstorage driver may not be the best choice for PaaS and other high density use cases.
One final point, data volumes provide the best and most predictable performance. This is because they bypass the storage driver and do not incur any of the potential overheads introduced by thin provisioning and copy-on-write. For this reason, you should to place heavy write workloads on data volumes.